月球背面“走钢丝”,“300”双连击,这个不赞怎么可以?
从极寒到酷暑,我们需要经历半年的季节变换,而远在月球背面的玉兔二号则每个月都会经历一遍。2019年10月22日11时45分,我们的玉兔又一次承受住了零下190多度的低温考验,成功自主唤醒,迎来第十一个月昼工作期。
月球背面“走钢丝”,绝处逢生,不靠运气靠实力
坑坑坑!
玉兔醒来以后首先就要下传完上月昼的探测数据,这是上个月昼玉兔采集的在不同太阳高度角下同一物质的光谱变化数据。目前玉兔位于冯卡门撞击坑的底部,脚下可能是月幔最深处的物质,这里采集的光谱数据,将为揭开月球形成和结构组成的秘密提供详实的佐证。把这些独家资料给了北京航天飞行控制中心的驾驶员们以后,新一轮的探险就开始啦!走好第一步,这是每个月都面临但仍次次都谨慎小心的一个课题,在反复规划好了路径的基础上,驾驶员还谨慎地让玉兔低头看看脚下的路况,结果这一看让大家吃了一惊——三面都是坑。面对如此“坑兔”的地形,要从中找到一条突围的路径相当困难,特别是起步后的两个小型撞击坑,深度都达到了6公分以上,如果一不小心在这里被坑了,会导致车体滚动倾斜,严重影响玉兔的安全。
“虚拟规划”
除了地面崎岖造成的困难,还有太阳位置的影响,此时太阳在东偏北方向,由于阴影限制,所以玉兔必须从西北侧的两个小型撞击坑附近寻找突破口,只能从两个撞击坑中间穿过。经测量两坑之间的距离为0.9米左右,而玉兔的左右车轮间距为1米,路比车轮间距还要窄,想要从中间穿过去就像走钢丝一样,两边车轮会各悬空一部分在坑里。这样高难度的“走钢丝”对驾驶员们的控制精度提出极高要求,丝毫偏差都可能造成极大风险,驾驶员们祭出了技术这个法宝。虚拟规划技术是驾驶员们根据玉兔的构型、动作,将未来行驶的路径在当前数字高程图上进行投影的预先仿真技术。通过虚拟规划的展示,玉兔当前位置,目标终点以及经过路径全部一目了然。驾驶员们通过虚拟规划技术进行了驾驶员们慎之又慎的反复演算,在确保每个步骤都万无一失以后,发出指令,前进!
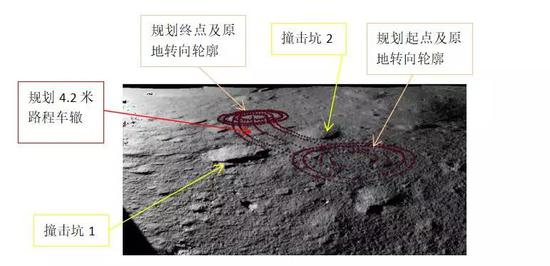
▲玉兔“走钢丝”突围撞击坑
10月23日上午10时47分,玉兔开始移动突围,遥测显示玉兔已经移动完毕了,姿态正常。稍稍松了一口气的驾驶员们赶紧进行了感知成像,图像显示,在驾驶员的精准控制之下,玉兔安全穿越了两坑之间的狭窄区域,行驶4.2米,平稳到达目标点!通过图像可以看到,右车轮稍有轧过坑沿,与规划反投影的结果保持一致,驾驶员们再次凭借勇气与实力让玉兔在38万公里外的高度“走钢丝”突围!
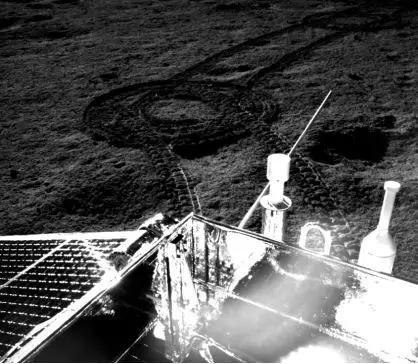
▲移动到位后拍摄的车辙导航图像
好事要成双,“过坑”也一样
胜利“突围”的小兔子,还没来得及享受成功的喜悦,就又迎来了一大一小两个撞击坑的“围堵”,看来这个月昼咱们的玉兔和坑的爱恨情愁要好好理一理了。虽然坑很多,但个个有不同,不同于之前的两坑间距狭窄,这回两者间距空间较大,而困难在于周围分布的许多溅射的小坑,地形坑洼不平,不远处还有两个大型撞击坑的“夹击”,这一路的妖魔鬼怪真不少。月昼上午只剩移动两步的时间了,这两步必须要完成对两个大型撞击坑的穿越,时间紧急,没有一丝歇脚的机会。但由于视场所限,在起点处是无法看到月午位置的情况的,具体情况只能走完第一步再感知规划,一向是走一步看十步的驾驶员们,面对现在的情景自是放心不下,如果两步后无法穿越两个大型撞击坑,那月昼下午的工作展开就相当困难。但是自古华山一条路,玉兔在驾驶员们的控制下阔步向前,连续两次穿越精准迅速,顺利来到大型撞击坑北侧,抵达理想的月午位置。
“
玉兔二号不知不觉已经上岗十个月了,工作以来,她在月球背面不断刷新着人类探索的纪录。2019年10月25日9时58分,玉兔二号累计行驶305.95米,首次突破300米里程。五天后,玉兔的月面工作时间又突破了300天,她正是以平均每天一米的速度在月球背面创造人类历史。
截至本月昼休眠时刻,玉兔二号共行驶318.62米,累计月面工作304天。险路重重,征程漫漫,虽然茕茕孑立,却不踽踽独行,身后有飞控的驾驶员们为你保驾护航,加油吧玉兔,还有更多里程碑等你去创造!

▲第十一月昼全景图
关键词: 月球走钢丝
相关阅读
-
北汽蓝谷加速高端转型 市场看好极狐品...
10月30日,北汽蓝谷披露2022年第三季度报告。报告显示,北汽蓝谷202... -
正股涨停可转债为什么不涨?垃圾发电上...
在股票市场上,股票与可转债具有一定的联动性,即当股票上涨时,会... -
人民币升值对a股有什么影响?2022年IDC...
人民币贬值对股市来说是一种利好,会推动股市上涨,即人民升值,国... -
可转债配售比例一般是多少?生态农业上...
各大上市公司可转债的配售比例是不一样的,主要还是在于上市公司的... -
海航控股市值多少亿?个股的常用技术指...
海航控股10月31日股价,截至11时,该股跌2 68%,股价报1 450元,... -
怎么知道自己中签了?克明食品最新报价...
截止11时04分,克明食品报10 850元,跌0 09%,总市值36 67亿元。... -
勤哲Excel服务器无代码实现住建局综合业...
一直以来,我国对于房地产行业都倾向于正向的扶持和引导,有专家认... -
全球财务领导力与风险评估师GFLRA—加速...
新一代信息技术正在深刻影响着经济社会的高质量发展。国家十四五规... -
前三季度深圳地区生产总值为22925.09亿...
10月29日,市统计局发布最新统计数据, 2022年前三季度深圳地区生... -
10月31日A股盘前要闻
10月31日A股盘前要闻 -
智通A股融资融券统计|10月28日
智通A股融资融券统计|10月28日 -
每日动态!机构策略:情绪交易集中释放 ...
机构策略:情绪交易集中释放带来右侧更好买点 -
【世界速看料】《大霄说》第一千五百期
《大霄说》第一千五百期 -
4963家A股上市公司披露三季报超八成盈利...
4963家A股上市公司披露三季报超八成盈利新能源赛道抢眼传统产业回暖 -
全国首个混凝土模块化高层建筑吊装完成...
5栋近百米高楼,由6028个混凝土模块单元组成,一年可建成!近日,深... -
“深南电路杯”设置6个赛项 选手大多为...
近日,高鹏展翅 园梦启航2022第十八届深南电路杯航空模型大赛在深... -
禹城市工商联建立民营经济统战工作协调...
民营经济顶起了山东省禹城市经济的大半边天。近年来,禹城市不断加... -
玉山县发挥“工商联+司法局”沟通联系机...
法治是最好的营商环境。近年来,江西省玉山县紧盯企业需求,充分发... -
财富周历 动态前瞻丨本周将公布10月PMI...
财富周历动态前瞻丨本周将公布10月PMI数据,8只新股发行 -
A股步入深度价值区间 安全性和确定性正...
A股步入深度价值区间安全性和确定性正成为当前市场关注的重点